Пензенский Государственный Университет
Кафедра “Радиотехника и радиоэлектронные
системы”
Курсовая работа
по предмету “Схемотехника аналоговых
электронных устройств”
Тема работы:
“ТИРИСТОРНЫЙ
РЕГУЛЯТОР МОЩНОСТИ SCR3M0 И УНИВЕРСАЛЬНЫЙ
МОДУЛЬ
УПРАВЛЕНИЯ РЕГУЛЯТОРАМИ RCB1M0”
Выполнил: студент гр. 04РР1
Матянин С. В.
Работа принята:
Волков С. В.
Пенза, 2007.
1. Введение.
Данная курсовая работа состоит из двух
частей: разработка универсального модуля тиристорного регулятора мощности и
разработка универсального модуля
управления регуляторами. Эти модули разрабатываются для использования в
аппаратуре измерения параметров электровакуумных приборов, однако могут быть
использованы и в других электронных устройствах.
2. Регулятор мощности
тиристорный универсальный SCR3M0
2.1. Регулятор предназначен для регулирования
мощности активной (лампы накаливания, нагреватели) или активно-индуктивной
(электродвигатели, трансформаторы) нагрузки, питающейся от сети 220V 50Hz.
Регулятор разрабатывался для регулирования скорости электродвигателей устройств
вентиляции и мощности подогревателей электровакуумных приборов, подключенных к
сети через понижающий трансформатор. Поскольку указанные нагрузки имеют
индуктивный характер, при макетировании регулятора проверялась его способность
работать с этими типами нагрузок. Регулятор можно использовать как с ручным
управлением (при помощи переменного резистора), так и в системах с
автоматическим управлением (подачей управляющего напряжения).
2.2.
Выбор схемы управления.
В настоящее время получили распространение
несколько схем управления тиристорами. Наиболее простыми и экономичными
являются схемы, отпирающие тиристор подачей ему в управляющий электрод
короткого импульса тока. Благодаря экономичности схем такого типа их можно
питать от сети 220V через
балластный резистор (а не силовой трансформатор), что резко снижает стоимость
регулятора. Недостатком подобных схем является ненадежность запуска тиристора
при индуктивной нагрузке, т. к. за время действия открывающего импульса ток
через тиристор не достигает тока удержания. Данный недостаток может быть
уменьшен применением тиристоров с малым током удержания и подключением
параллельно индуктивной нагрузке резистора.
В качестве порогового устройства в схеме
управления тиристором сейчас часто применяются динисторы (например КН102) или
симметричные динисторы (например DB3).
Применение динистора позволяет резко упростить схему управления. Однако, как
показали проведенные опыты, схемы управления, выполненные на динисторах имеют
гистерезис, т. е. разные характеристики при повороте ручки управления в сторону
уменьшении и увеличения мощности. Гистерезис затрудняет управление регулятором,
что особенно заметно при минимальной выходной мощности. В регуляторах с динистором
гистерезис может быть уменьшен, однако полностью избавиться от него не удается.
Поэтому схема управления была выполнена на транзисторах.
Иногда требуется организовать дистанционное
управление регулятором мощности. Оно может потребоваться при использовании
регулятора в системе с автоматическим регулированием (температуры, напряжения,
скорости) или в системе с управляющей ЭВМ. Во многих случаях вход управления
должен иметь гальваническую развязку от сети 220V, например, для обеспечения безопасности оператора.
Поэтому было решено предусмотреть управление при помощи оптрона. Поскольку
широко распространенные транзисторные оптроны типа АОТ127 или 4N35 стоят порядка нескольких рублей, для
управления мощной нагрузкой оказывается выгоднее использовать регулятор с
оптронным управлением, чем мощные оптронные тиристоры, например, типа ТО125.
2.3.
Выбор силовой части.
В настоящее время в продаже имеется несколько
распространенных типов тринисторов и симисторов. Тринисторы также могут
называть кремниевыми управляемыми вентилями (КУВ). В зарубежной литературе их
обычно называют Silicon Controlled Rectifiers
(SCR). Тринисторы могут
проводить ток только в одном направлении. Поэтому при их использовании с
нагрузкой, работающей на переменном токе, например, электродвигателями,
устанавливают два тринистора – один на положительный полупериод, а другой на
отрицательный или единственный тринистор используют совместно с выпрямительным
мостом, что приводит к увеличению размеров и стоимости регулятора.
Симисторы (“симметричные” тиристоры, в
зарубежной литературе - triac)
могут работать на переменном токе, поэтому схемы регуляторов с ними получаются
очень простыми и получили широкое распространение.
Как известно, тиристорный регулятор с одной и
той же схемой управления можно использовать c нагрузкой различной мощности. В зависимости
от мощности нагрузки выбирается тип тиристора и диодов, а также размеры
радиаторов. Поэтому принято решение предусмотреть возможность установки
маломощного тиристора и диодов на одной печатной плате со схемой управления при
работе с маломощной нагрузкой. Если потребуется работать с нагрузкой большой
мощности (до 1kW),
тиристор можно будет установить вне платы на радиаторе.
Как известно, при работе на индуктивную
нагрузку тиристор должен иметь по возможности меньший ток удержания. Из широко
распространенных тиристоров был выбран КУ208Г т. к. он имеет достаточно большое
допустимое напряжение (400V) и
достаточно малый ток удержания (100mA).
Хотя КУ208 является симистором, он используется как обычный тиристор. Дело в
том, что симисторы не являются абсолютно симметричными приборами, поэтому при
неблагоприятном стечении обстоятельств регулятор может начать работать в
однополупериодном режиме. Т. к. нагрузкой разрабатываемого регулятора может
быть трансформатор или электродвигатель, однополупериодный режим недопустим.
2.4. Схема регулятора
На
основании приведенных выше рассуждений была составлена принципиальная схема
регулятора (см. рис. 1).
Напряжение сети выпрямляется диодным мостом VD1-VD4.
Резисторы R1-R3 и стабилитроны VD5-VD7
образуют стабилизатор питания схемы управления. В точке “a” получаются трапециидальные импульсы
напряжения с амплитудой около 20V.
Схема управления собрана на транзисторах VT1 и VT2.
Через переменный резистор (установлен вне платы) и резистор R4 заряжается времязадающий конденсатор C1. Когда напряжение на C1 превысит напряжение в точке соединения R6 и R7,
открывается транзистор VT1.
Своим коллекторным током он открывает транзистор VT2. Коллекторный ток VT2 открывает VT1. Поэтому транзисторы лавинообразно
открываются и разряжают конденсатор С1 через диод VD8 и резистор R8 в управляющий электрод тиристора. Резистор R8 ограничивает ток управляющего электрода
тиристора. Диод VD8
предотвращает влияние тиристора на работу схемы управления. Резистор R9 предотвращает самопроизвольное отпирание
тиристора. Резистор R5
уменьшает влияние помех на схему управления.
Рис. 1.
Для дистанционного управления к точкам “а” и
“б” подключается оптрон VU1 с
вспомогательными элементами. Управляющее напряжение подается на выводы CNT- и CNT+1,
в этом случае резистор R10
ограничивает ток светодиода оптрона. Если управление модулем SCR3M0
осуществляется от источника тока, используются выводы CNT- и CNT+2.
Резистор R11 определяет чувствительность оптрона. Диод VD9 не допускает появления на фототранзисторе
оптрона обратного напряжения.
2.5.
Печатная плата. Для регулятора мощности была разработана печатная плата (см.
рис. 2). Разработка платы проводилась в программе PCAD.
Рис. 2.
В центральной части
платы находятся элементы схемы управления тиристором. С одного края может быть
установлен тиристор (без радиатора или с небольшим радиатором). С другого края
может быть установлен оптрон. Ширина платы 50mm. Длина без оптрона и тиристора – 120mm. С оптроном и тиристором длина платы 160mm.
3.
Комплект модулей RCB1M0 и CVB1M0 для управления источниками питания. Данный комплект модулей разработан для
управления различными источниками питания. Разработано два таких комплекта:
один в источнике +5…15V и
другой – в источнике 0…+400V. Для
источников питания на разные напряжения отличаются только номиналы деталей
модуля RCB1M0.
Рассмотрим схему модуля управления
регулятором RCB1M0 (см. рис. 3).
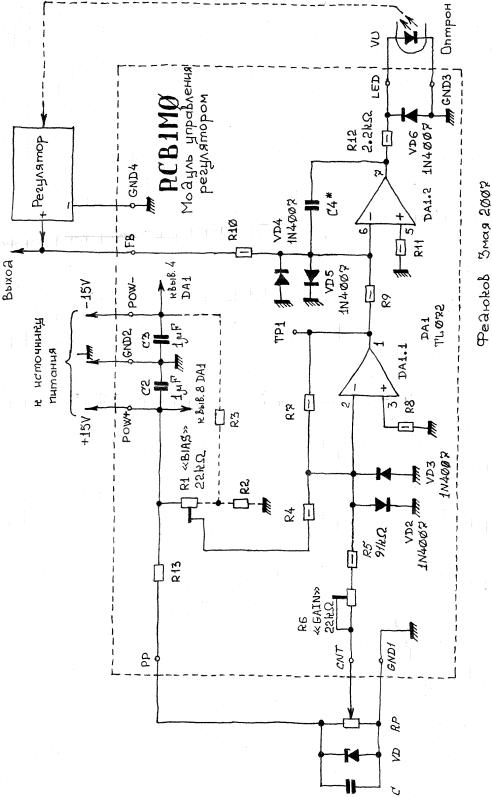

Рис. 3.
В схеме использована одна микросхема DA1 типа TL072 (сдвоенный дифференциальный усилитель).
Схема состоит из двух каскадов: суммирующего инвертирующего усилителя на DA1.1 и устройства сравнения на DA1.2.
Для управления выходным напряжением
регулятора на вход CNT
модуля RCB1M0 подается управляющее напряжение. Через
резисторы R5 и R6 входной сигнал подается на инвертирующий
вход 2 микросхемы DA1.
Через резистор R7 DA1.1 охвачена отрицательной обратной связью.
Подстройка чувствительности схемы к управляющему напряжению на входе CNT осуществляется подстроечным резистором R6.
Поскольку иногда требуется чтобы при нулевом
входном напряжении на выходе регулятора получалось ненулевое напряжение, на
вход 2 DA1.1 можно также подать
смещение с резисторов R1-R4. Резистор R1 служит для регулировки смещения (напряжения
на выходе регулятора при нулевом напряжении на входе CNT). Если смещение не требуется, элементы R1-R4
не устанавливают.
Диоды VD2 и VD3
служат для защиты усилителя DA1.1
от выхода из строя при случайной подаче на вход модуля недопустимо большого
напряжения. Резистор R9
необходим для выравнивания напряжений смещения на входах 2 и 3 микросхемы DA1.1, т. е. для уменьшения дрейфа нуля
суммирующего усилителя. Суммирующий усилитель на микросхеме DA1.1 является инвертирующим т. е. при подаче
на вход положительного напряжения выходное напряжение будет отрицательным.
Выходное напряжение суммирующего усилителя можно проверить в контрольной точке TP1.
На втором усилителе микросхемы DA1 собрана схема сравнения. На вход 6 этого
усилителя через резистор R10
подается ток, пропорциональный положительному выходному напряжению регулятора,
а через резистор R9 –
ток, пропорциональный отрицательному выходному напряжению суммирующего
усилителя на DA1.1.
Разность токов резисторов R9 и R10 соответствует отклонению выходного
напряжения от значения, заданного входным сигналом модуля (вывод CNT). К выходу 7 усилителя DA1.2 подключен светодиод оптрона, управляющего
регулятором напряжения. Заметим, что регулятор сконструирован так, что при
увеличении тока через светодиод оптрона повышается выходное напряжение
регулятора.
Если, например, выходное напряжение
регулятора по каким-либо причинам увеличится, на входе 6 усилителя DA1.2 появится положительное напряжение.
Поскольку сигнал, приложенный к входу 6 DA1.2 инвертируется, напряжение на выходе 7
усилителя станет ниже, ток через светодиод уменьшится и выходное напряжение
регулятора понизится, т. е. придет в соответствие с входным управляющим
сигналом модуля (вывод CNT).
Диоды VD4 и VD5
защищают вход 6 микросхемы от повреждения из-за случайной подачи недопустимо
большого напряжения. Резистор R12
служит для ограничения тока через светодиод. Диод VD6 не допускает появления обратного напряжения
на светодиоде. Конденсаторы C2 и C3 подавляют помехи в цепях питания микросхемы
DA1.
Резистор R13 может быть установлен, если необходимо вне
модуля параллельно потенциометру резистору RP установить стабилитрон VD для стабилизации управляющего напряжения.
Потенциометр питается через вывод PP
модуля RCB1M0. В изготовленных модулях RCB1M0
вместо R13 впаяны перемычки т.
к. стабилизаторы управляющего напряжения собраны на отдельных печатных платах.
Конденсатор C1
подбирается для устранения паразитных колебаний в системе автоматического
регулирования.
Изготовлено два модуля RCB1M0,
отличающиеся номиналами установленных деталей. Эти изменения можно свести в
таблицу:
Исполнение 1 Исполнение 2
(Uвых от +5V до
+15V) (Uвых от 0 до
+400V)
R1 потенциометр 22kΩ
отсутствует
R2 перемычка отсутствует
R3 отсутствует отсутствует
R4 330kΩ отсутствует
R7 100kΩ 100kΩ
R8 47kΩ 47kΩ
R9 5.1kΩ 5.1kΩ
R10 10kΩ 390kW=3*130kW на плате регулятора
R11 3.3kΩ 5.1kΩ
R13 перемычка перемычка
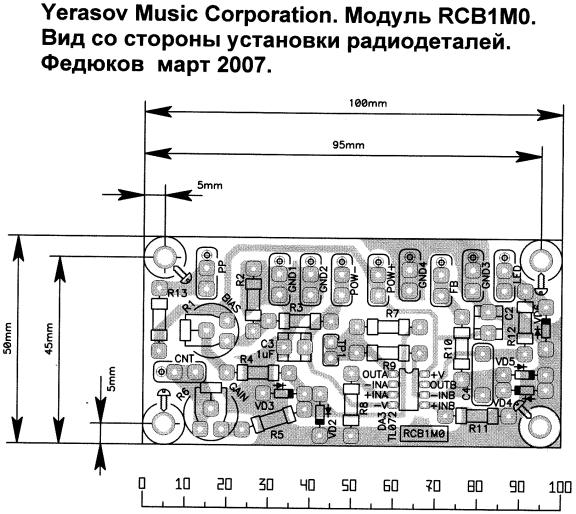
Рис. 4.
Для
обоих исполнений модуля RCB1M0 входное напряжение от нуля до +5V, входное сопротивление 100kΩ.
Органы управления выходным напряжением стабилизаторов
установлены на модулях управляющего напряжения CVB1M0.
Схема модуля CVB1M0 (одинаковая для источников +5…+15V и 0…+400V) приведена на рис. 5.
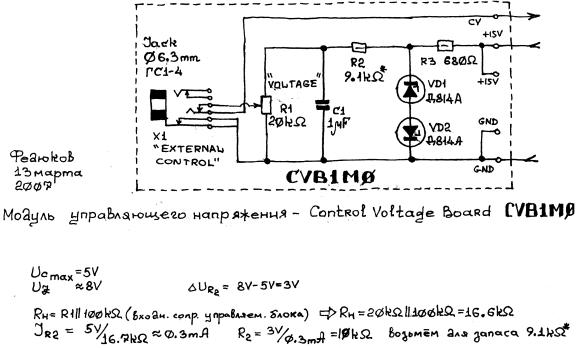
Рис. 5.
Модуль CVB1M0
обеспечивает ручное или дистанционное управление источником питания. На модуле CVB1M0
установлены стабилизатор напряжения, потенциометр и гнездо с переключающими
контактами.
Стабилитроны VD1, VD2
и резистор R3 образуют
параметрический стабилизатор напряжения. Стабилитрон VD2, включенный в прямом направлении
компенсирует увеличение напряжения стабилитрона VD1 при повышении температуры.
Резистор R2 включен последовательно c потенциометром R1 чтобы при верхнем по схеме положении движка
потенциометра выходное напряжение модуля (вывод CV) было около 5V.
Потенциометр R1 служит для ручного управления источником
питания.
В режиме дистанционного управления, т. е. при
включении штекера в гнездо X1 “External Control”
(“Внешнее управление”) движок потенциометра отключается, а на выход CV модуля через штекер поступает напряжение
дистанционного управления (от нуля до +5V).
* * *
В процессе
выполнения курсовой работы я глубоко ознакомился с конструированием печатных
плат радиоэлектронной аппаратуры и технологией производства печатных плат по
методу “лазерного утюга”.